
Pixhawk 2nd GPS RTK 연결하기 2015년 12월 7일 – Posted in: 리뷰, 실험비행 – Tags: gps, rtk, 픽스호크
2021년형 레이븐아이즈 드론방제사
방제 어플 할인 판매 바로가기
Pixhawk second GPS RTK 연결하기
이 포스팅은 Pixhawk에 GPS 를 2개 장착하는 내용을 제공합니다. 사용된 2nd GPS는 cm수준의(5cm) 포지셔닝 정확도를 가진 Swift Navigation 의 RTK제품입니다.
RTK 는 인공위성 기반(GPS, GLONASS, Galiel, Beidou and GAGAN) 고정밀 포지셔닝 시스템 기술로, Reference 기지국으로 부터 실시간 보정정보를 받아 위치 오차를 센티미터 단위 내로 제공할 수 있습니다.
From Wikipedia : what is RTK?
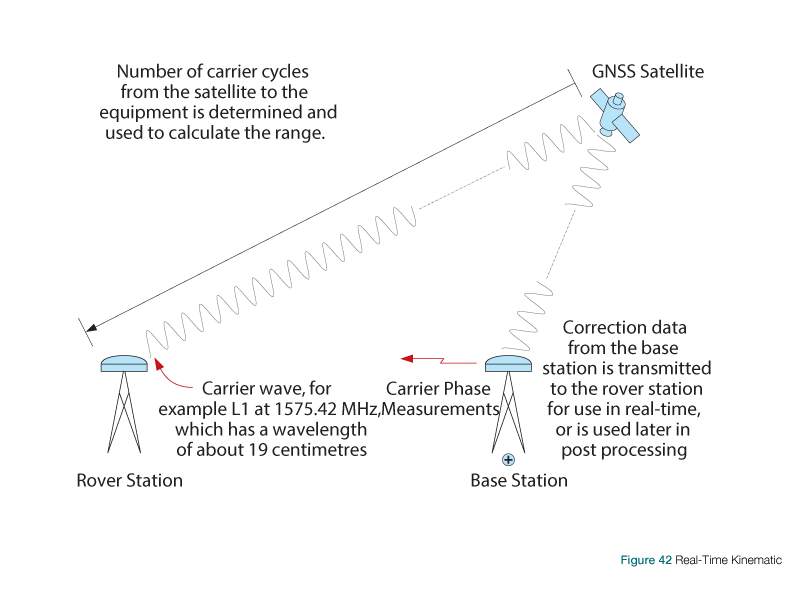
Real Time Kinematic (RTK) satellite navigation is a technique used to enhance the precision of position data derived from satellite-based positioning systems (global navigation satellite systems, GNSS) such as GPS, GLONASS, Galileo, BeiDou, and GAGAN. It uses measurements of the phase of the signal’s carrier wave, rather than the information content of the signal, and relies on a single reference station or interpolated virtual station to provide real-time corrections, providing up to centimetre-levelaccuracy. With reference to GPS in particular, the system is commonly referred to as Carrier-Phase Enhancement, or CPGPS.[citation needed] It has application in land surveyand in hydrographic survey.
기술 구현의 개념도(출처:http://www.novatel.com/)
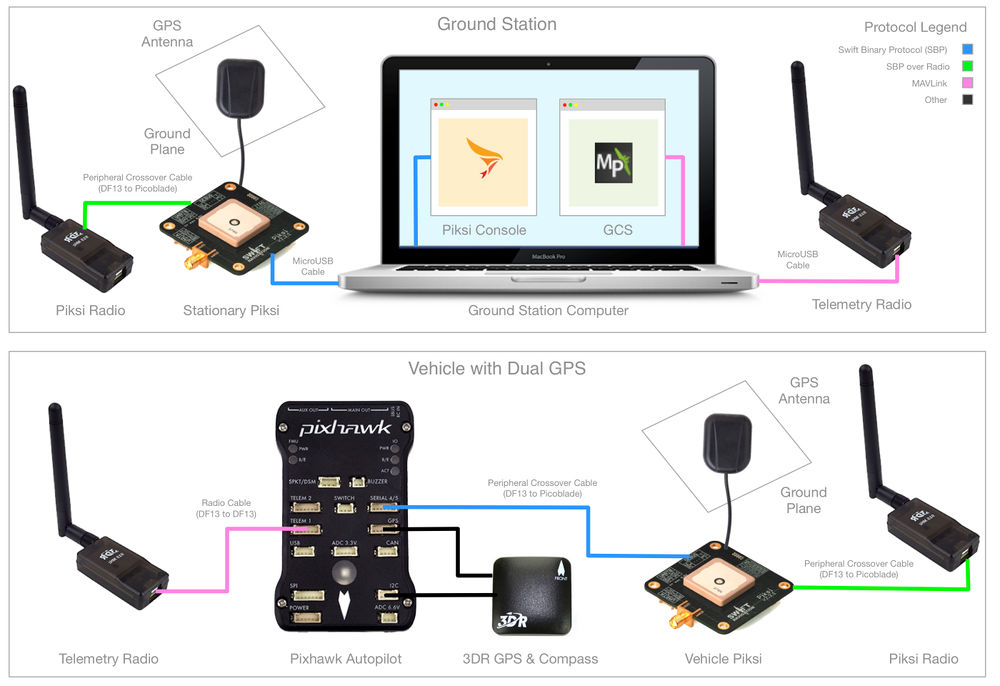
Pixhawk 기본 연결도
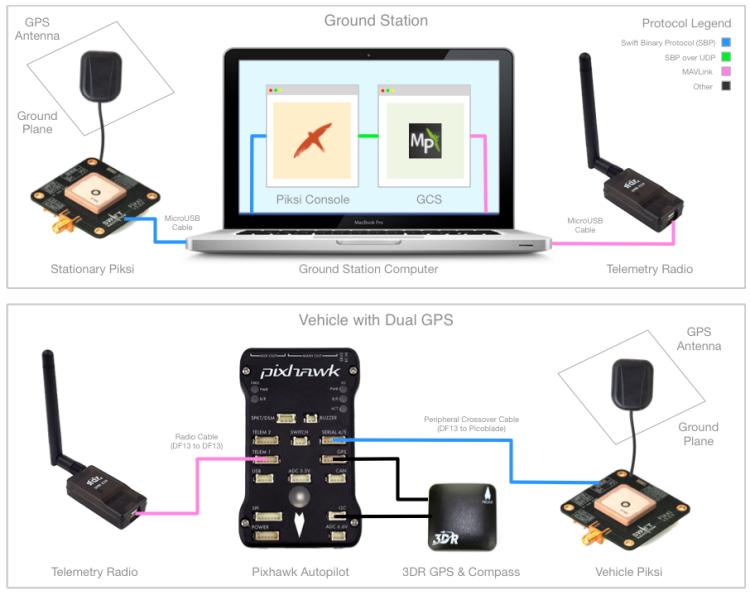
RTK의 위치정보에 관한 Protocol은 SwiftNav 이며 UART 로 출력됩니다.
RTK module의 UART신호를 Pixhawk 의 Serial 4/5 포트에 연결합니다.
Pin wiring은 VCC, GND, RX(#4), TX(#4)만 연결하시면 됩니다. 픽스호크 Serial 4/5 Pinout은 다음과 같습니다.
| Pin | Signal | I/O 전압 |
| 1(적색) | VCC | 5V |
| 2(검정) | TX (port 4) | 3.3V |
| 3(검정) | RX (port 4) | 3.3V |
| 4(검정) | TX (port 5) | 3.3V |
| 5(검정) | RX (port 5) | 3.3V |
| 6(검정) | GND | GND |
GCS(Mission Planner 사용) 설정
Pixhawk의 2nd GNSS(GPS)를 enable 하기 위해서 다음 Parameter를 변경합니다.
| Param | Value | Notes |
|---|---|---|
| GPS_TYPE2 | 8 | Switfnav |
| SERIAL4_PROTOCOL | 5 | GPS Mode |
| SERIAL4_BAUD | 115 | Baud rate of 115200 |
| GPS_SBP_LOGMASK | -1 | All messages logged |
| GPS_AUTO_SWITCH | 1 | Switch to GPS reporting best fix for vehicle control |
연결작업이 완료 되었습니다. 제대로 동작하고 있는지 확인은 MP의 Status tab에서 GPSSTATUS2의 값을 확인합니다.
1이면 정상적으로 Reference 기지국와 통신이 이루어 지고 있는것이고요,
조금 더 기다리면 4가 되는데 이때부터 포지셔닝을 사용할 수 있습니다.
4가 되면 float 상태이고 Reference 기지국(고정국)의 정확한 포지셔닝을 위해 샘플링 중인 상태이며,
5가 되면 완전한 fix상태입니다.
이제 기체는 5센티미터 이내의 고정밀 위치정보를 갖게 되었습니다.
기체 비행성만 훌륭하다면 GPS모드로 말뚝박아 놓으시면 꿈쩍도 하지 않을 것입니다. ^.^
단, 항상 5센티미너 내의 정확도를 보이는 것은 아닙니다. Air condition에 따라 오차 범위는 더 커질 수 있습니다.