헤딩 제어 원주비행 via ROS 2018년 3월 28일 – Posted in: 실험비행
다시 ROS!!

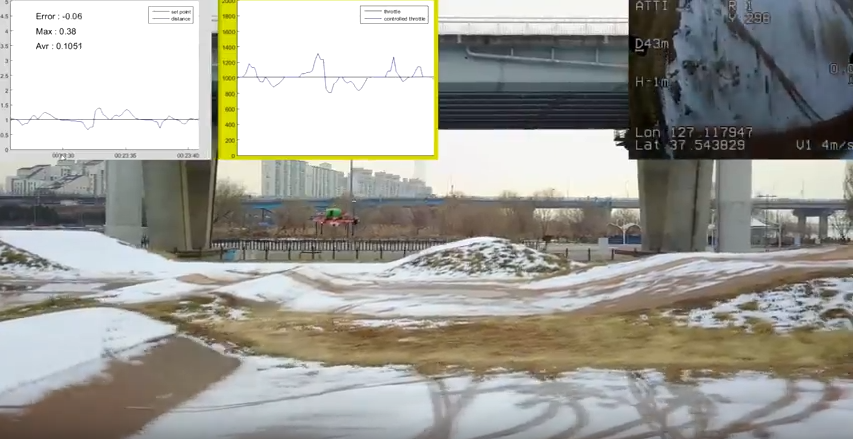
☆ 농업용 드론 고도유지 장치 개발과정 1. 시뮬레이션 과정 2. 백만서른한번째 비행 테스트 다초점 광각(전후좌우 110도) 라이다 방제드론과 농작물의 높이 유지 다랭이논,과수,밭작물, 방역(AI,구제역 등) 등 지상장애물 및 경사지 방제 시 고도유지 도움 장치
테스트 비행모드 : 수동(Manual, Stabilized) 테스트 비행간 스로틀 터치 없음 밭작물, 과수원, 다랭이논 등 굴곡/산악지형 방제 시 정밀한 자동 고도 유지(지형추적비행) 지면/농작물과 충돌위험 제거, 동일한 고도가 유지되어 일정량 약제 분사 가능 드론 방제사 조종 스트레스 제거
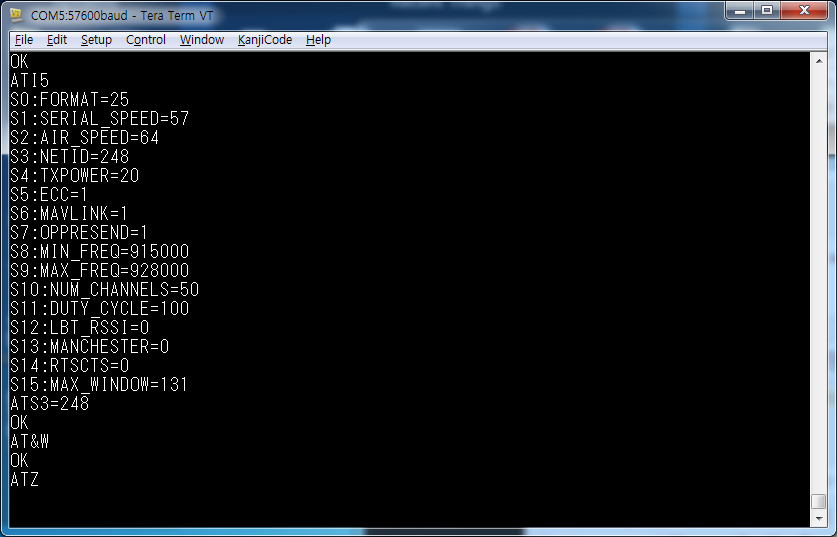
3DR 라디오 텔레메트리 설정하기 using AT 명령어 3DR의 라디오(정품)와 이와 호환하는 제품은 출고 시 Net ID가 25로 세팅되어 출고됩니다. 공장초기화 값이며 별다른 작업없이 서로 링크되어 있습니다. 혹시 주변에 동일 Net ID를 사용하시는 분이 계시면 혼선되므로 Net ID만 바꾸어 사용하세요! 시리얼 터미널을 열고, baud rate 57600, +++ 을 연속하여 입력하면 AT command mode로 진입합니다. 현재 설정된 모든 파라메터 보기 명령(ATI5)을 내려 보세요. 915Mhz Radio Default parameters ATI5 S0:FORMAT=25 S1:SERIAL_SPEED=57 S2:AIR_SPEED=64…
2021년형 레이븐아이즈 드론방제사 방제 어플 할인 판매 바로가기 Pixhawk second GPS RTK 연결하기 이 포스팅은 Pixhawk에 GPS 를 2개 장착하는 내용을 제공합니다. 사용된 2nd GPS는 cm수준의(5cm) 포지셔닝 정확도를 가진 Swift Navigation 의 RTK제품입니다. RTK 는 인공위성 기반(GPS, GLONASS, Galiel, Beidou and GAGAN) 고정밀 포지셔닝 시스템 기술로, Reference 기지국으로 부터 실시간 보정정보를 받아 위치 오차를 센티미터 단위 내로 제공할 수 있습니다. From Wikipedia : what is RTK? Real Time…
소형 항공방제용(농업용) 프로토타입 드론 – 프레임 : 옥토콥터 카본&알루미늄 프레임 – 비행콘트롤러 : Pixhawk – 공중방제를 위한 농약살포기(약품탱크 용량 5리터용) – GCS : Mission Planner 5L 소용량 탱크 항공 방제 농약 살포 드론 프로토타입 비행성능 테스트 기체무게(배터리제외) : 5,400 g 배터리 사양 : Li-Po 6셀(22.2V) * 2개 (10,000mAh 35C+ 1,232g) 총비행하중 : 7,864 g (배터리 장착) 비행시간 : TBD 최대추가가능하중 : 5Kg 내외
헥사콥터 Tarot 690S w/ Pixhawk – 프레임 : Tarot 690S 드론 헥사콥터 – 모터 : 2216 900KV – 프롭 : APC1247 – ESC : Xrotor 20A – 비행콘트롤러 : Pixhawk – 짐발&카메라 : 3DR camera housing & Cannon S100 – GCS : Mission Planner 기체무게(배터리제외,카메라제외,짐발포함) : 1,775 g 배터리 사양 : Li-Po 4셀(14.8V) 10,000mAh 10C 813g 총비행하중 : 2,783 g (카메라&배터리 장착) 비행시간(호버링) : 약 23분 최대추가가능하중 : 1Kg…
F450 + Pixhawk 쿼드콥터 드론 비행 – 프레임 : DJI F450 드론 쿼드콥터 – 모터&프로펠러 : 2213/935KV, 10*45 – ESC : 25A 4IN1 – 비행콘트롤러 : Pixhawk – GCS : Mission Planner 기체무게 : 764 g 배터리 사양 : Li-Po 3셀(11.1V) 5,200mAh 30C 389g 총비행하중 : 1,153g 비행시간(호버링) : 약25분 최대추가가능하중 : TBD
Tarot 650 + Pixhawk 쿼드콥터 드론 비행 테스트 – 프레임 : Tarot 650 드론 쿼드콥터 – 모터 : 3110 700KV – 프롭 : 12*55 카본프롭 – ESC : DYS 30A – 비행콘트롤러 : Pixhawk – 짐발 : YI3D 3축 짐발 – GCS : Mission Planner 기체무게(베터리제외,카메라제외,짐발포함) : 1,464 g 베터리 사양 : Li-Po 4셀(14.8V) 5,200mAh 10C 446g 총비행하중 : 1984 g (고프로장착) 비행시간(호버링) : 약 12분 최대추가가능하중 : TBD